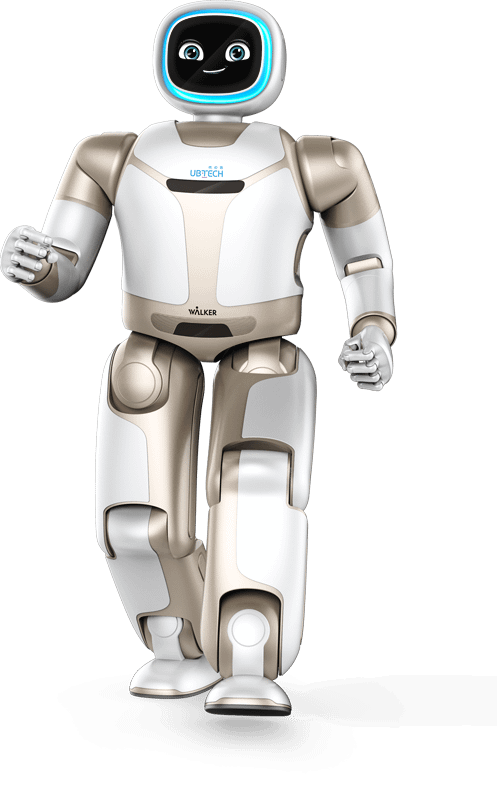
EngineAI PM01 redefines accessible humanoid robotics with high performance, agile movement, and open-source flexibility. Standing 1.38 m tall and weighing just 40 kg, it’s ideal for research, education, and early commercial applications, blending advanced hardware, dynamic motion, and developer-friendly design.






Product Description
EngineAI PM01 sets a new benchmark for accessible, high-performance humanoid robotics. Developed by Shenzhen’s EngineAI, it merges compact design, powerful AI-driven control systems, and dynamic motion capabilities — all at a breakthrough price point. Its open-source platform empowers researchers, educators, and innovators to push the boundaries of embodied AI and robotics development.
Key Features:
-
Compact & Lightweight Build: 1.38 m (4.5 ft) tall and ~40 kg for easy handling and agile operation.
-
High-Speed, Adaptive Locomotion: Speeds up to 2 m/s (≈7.2 km/h) with mechanical and natural gait modes; waist rotation up to 320° for expressive movement.
-
Dynamic Acrobatic Ability: Achieved the world’s first humanoid front flip, demonstrating exceptional balance and control.
-
Advanced Hardware & Control Systems: Dual-chip architecture with Intel N97 and NVIDIA Jetson Orin, high-resolution depth cameras, and a high-capacity battery for ~2 hours of continuous use.
-
Robust, Open-Source Design: 24 degrees of freedom with precision-engineered self-developed modules, offering high torque density and reliable performance, plus full open-source support for customization.
Mobility & Structure
Attribute
Value
Description
Why It Matters
Locomotion Type
Bipedal, wheeled-hybrid, etc.
Defines interaction envelope
Degrees of Freedom (DOF)
# of controllable joints
Directly tied to dexterity & versatility
Max Walk Speed
m/s
Static, dynamic balancing
Upper Body & Manipulation
Attribute
Value
Description
Why It Matters
Arm DOF
Each arm's axis count
Higher = more natural movement
Hand Dexterity
Pinch / 3-finger / 5-finger
Newtons
Grip Feedback
Force, pressure, tactile sensors
Enables delicate handling and learning
Perception
Attribute
Value
Description
Why It Matters
Visual Sensors (Eyes)
RGB / Depth / IR / LiDAR
Navigation, facial recognition, object tracking
Eye DOF / Movement
Can they move? (Y/N, axis count)
Naturalistic interaction & gaze tracking
Audio Sensors (Ears)
# of mics + array type
Needed for voice commands, sound source localization
Face Display / Actuators
LED screen / moving eyebrows / static
Social communication, emotional response
Face Expressiveness
None / Basic / Realistic
Higher = better interaction in social spaces
Interfaces
Attribute
Value
Description
Why It Matters
Voice Recognition
NLP model + languages supported
Enables natural user interaction
Speech Output
TTS engine used + quality level
Critical for public/commercial use
Touch UI / Screen
Present or not
Optional fallback interaction
Remote Control
N/A
Web / App / Joystick
Needed for manual override or remote training