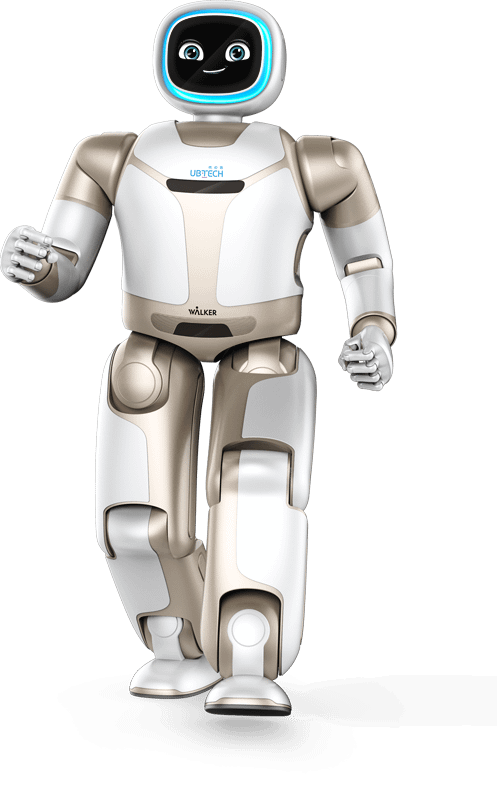
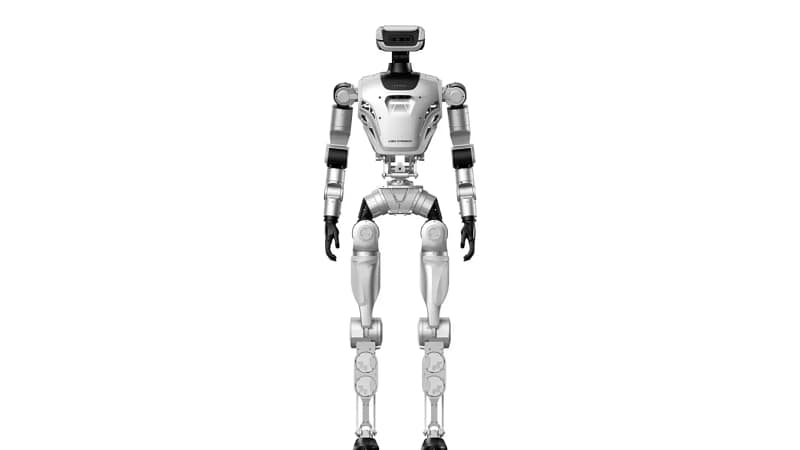
LimX Oli is a full-size, modular humanoid robot standing 1.65 m tall and weighing about 55 kg. Equipped with 31 degrees of freedom, adaptable arms, and advanced embodied intelligence, it excels in both industrial automation and research applications. Designed for flexibility, it supports real-time joint control, sensor access, and high-level scheduling via an open SDK—making it equally powerful in logistics, education, AI development, and human–robot collaboration.



Product Description
LimX Oli is a cutting-edge humanoid robot offering full-body mobility and adaptability, ideal for embodied AI experimentation, educational use, and industrial integration.
Key Features:
-
Human-Scale Build
Measures 1.65 m tall and weighs about 55 kg, delivering a realistic human form factor with robust stability and presence. -
High Articulation
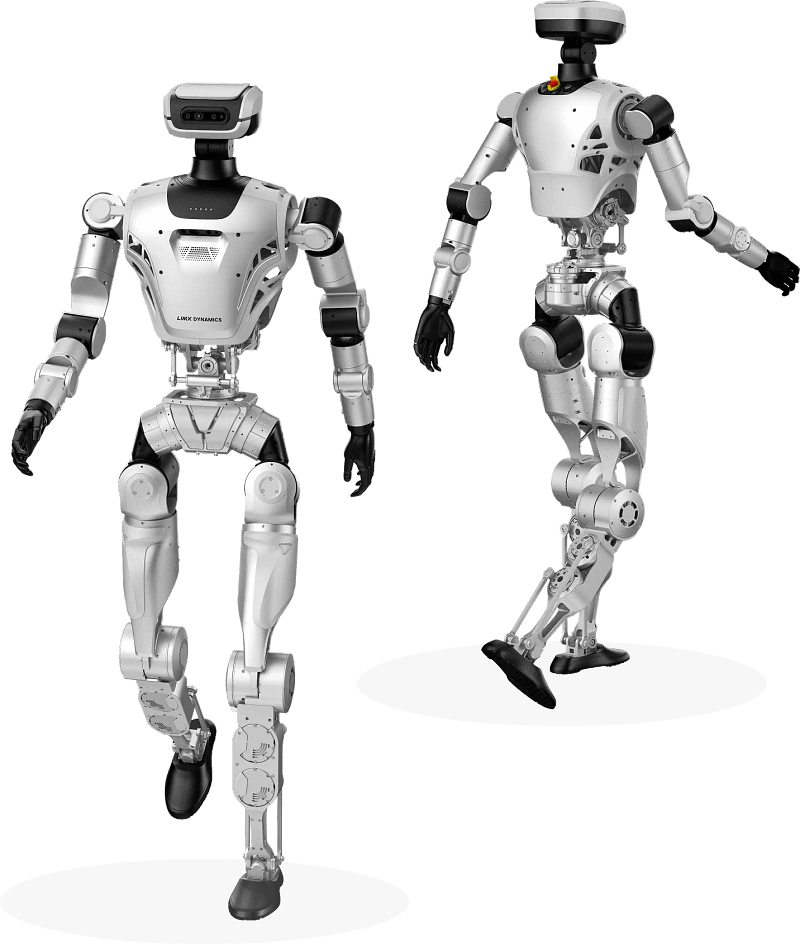
Offers 31 active degrees of freedom across the body, enabling fluid, coordinated motion in dynamic environments. -
Modular Architecture
Hardware and software components are easily swappable—arms can be fitted with standard hands, precision grippers, or advanced dexterous manipulators, tailored to the task. -
Open Software Development Kit
Users gain full control over sensor input, robot status monitoring, joint actuation, and high-level task scheduling. Includes support for OTA updates and an evolving toolchain for smooth deployment. -
Versatile Real-World Performance
Performs a wide variety of tasks—from lifting weights and martial arts to warehouse sorting, arm swapping, and rhythmic dancing—showcasing resilience and multi-scene adaptability. -
Flexible Versions for Diverse Needs
Available in Lite for entry-level adoption, EDU for educational environments, and Super as a fully featured professional variant. -
Cost-Effective Innovation
Positioned at a competitive starting price, LimX Oli brings advanced humanoid technology to institutions and innovators without the need to build from scratch.
Mobility & Structure
Attribute
Value
Description
Why It Matters
Locomotion Type
Bipedal, wheeled-hybrid, etc.
Defines interaction envelope
Degrees of Freedom (DOF)
# of controllable joints
Directly tied to dexterity & versatility
Max Walk Speed
m/s
Static, dynamic balancing
Upper Body & Manipulation
Attribute
Value
Description
Why It Matters
Arm DOF
Each arm's axis count
Higher = more natural movement
Hand Dexterity
Pinch / 3-finger / 5-finger
Newtons
Grip Feedback
Force, pressure, tactile sensors
Enables delicate handling and learning
Perception
Attribute
Value
Description
Why It Matters
Visual Sensors (Eyes)
RGB / Depth / IR / LiDAR
Navigation, facial recognition, object tracking
Eye DOF / Movement
Can they move? (Y/N, axis count)
Naturalistic interaction & gaze tracking
Audio Sensors (Ears)
# of mics + array type
Needed for voice commands, sound source localization
Face Display / Actuators
LED screen / moving eyebrows / static
Social communication, emotional response
Face Expressiveness
None / Basic / Realistic
Higher = better interaction in social spaces
Interfaces
Attribute
Value
Description
Why It Matters
Voice Recognition
NLP model + languages supported
Enables natural user interaction
Speech Output
TTS engine used + quality level
Critical for public/commercial use
Touch UI / Screen
Present or not
Optional fallback interaction
Remote Control
N/A
Web / App / Joystick
Needed for manual override or remote training