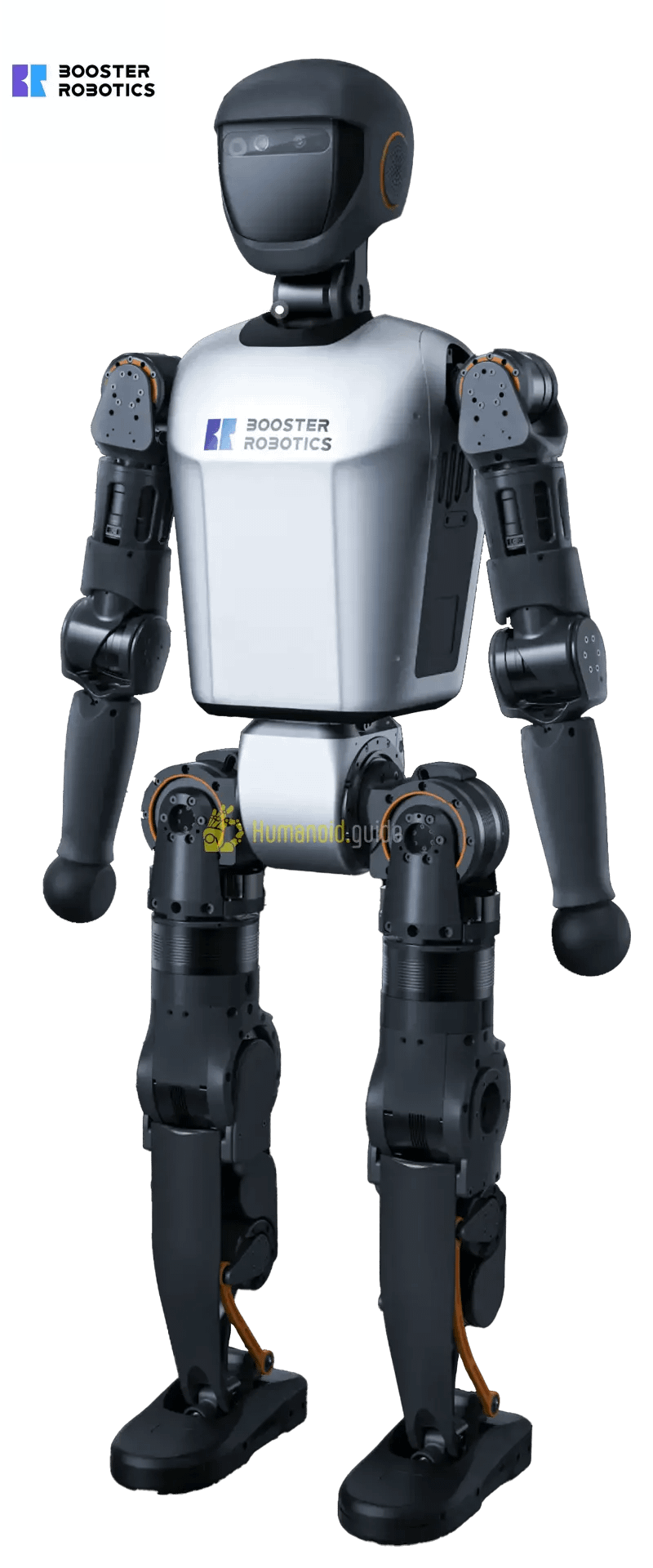
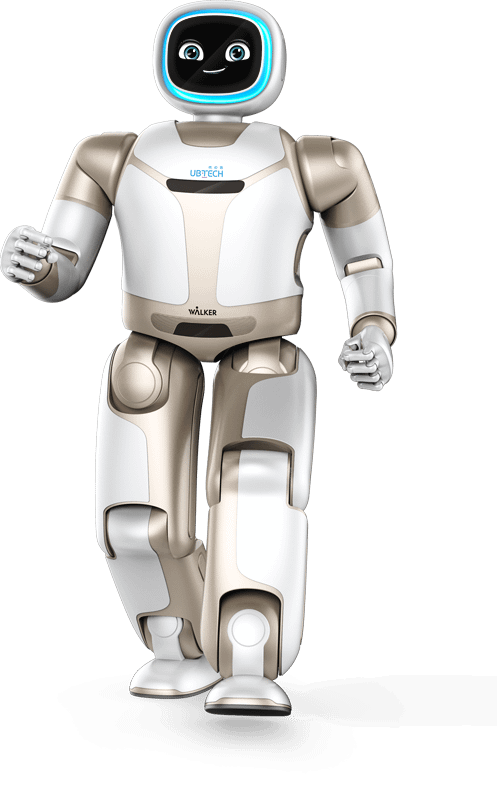
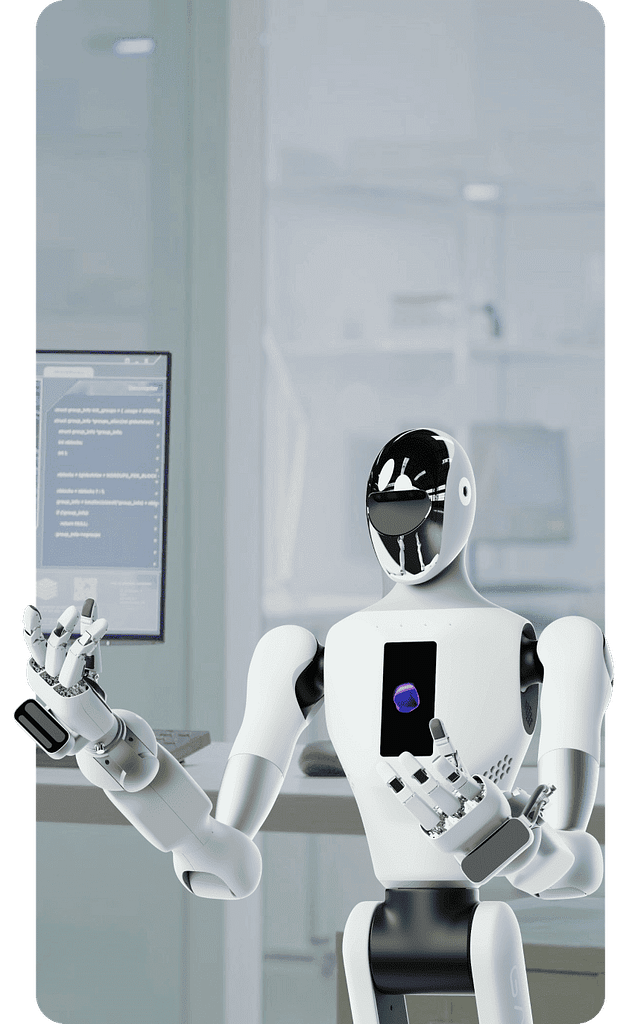
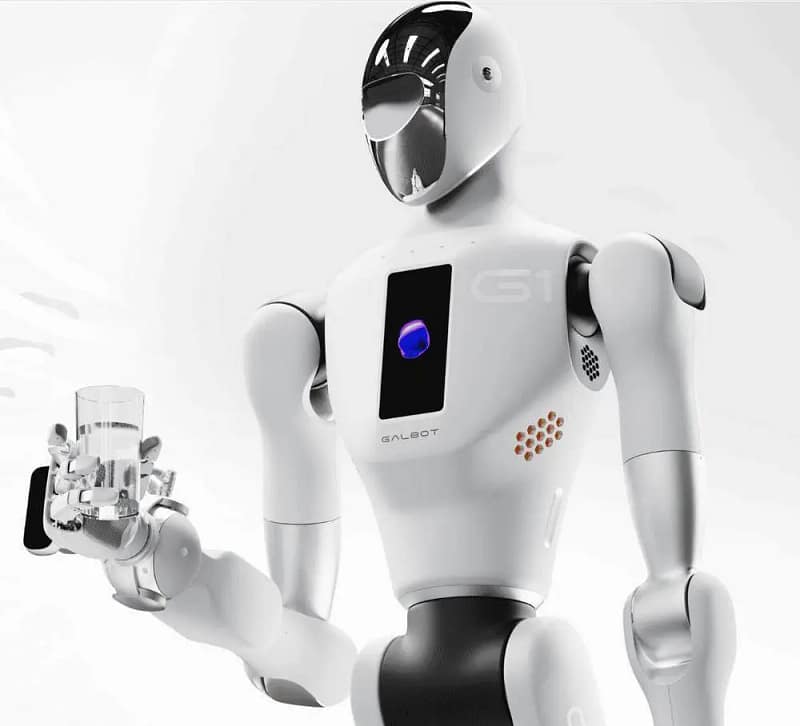
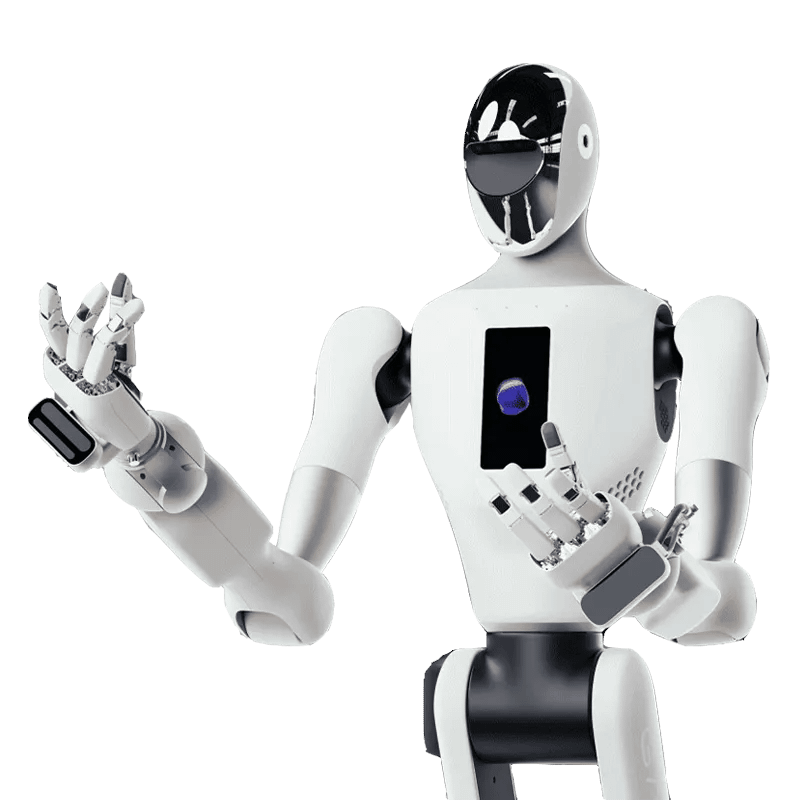
Galbot G1 is a sophisticated humanoid robot that combines a robust wheeled base with a human-scale upper body, dual-arm manipulation, and immersive AI. Standing 173 cm tall with a 190 cm arm span, it offers a 10-hour runtime and handles up to 5 kg loads. Equipped with visual and tactile perception, voice control, and simulation-trained intelligence, Galbot G1 adapts to both industrial and household tasks—capable of crouching, reaching, grasping, and handling objects with precision.


Product Description
The Galbot G1 is a cutting-edge humanoid robot engineered for versatility in robotics research, AI development, and human-robot interaction. At approximately 127 cm tall and 35 kg in weight, it is equipped with 23–43 high-torque joint motors and a large-angle motion structure, enabling lifelike movement and exceptional agility.
Key Features:
-
Exceptional Mobility: Runs over 2 m/s, performs dynamic walking, squats, and folding sits.
-
Advanced Motion Control: Smooth, precise, and highly coordinated humanoid movements.
-
High Agility: Capable of complex tasks like object manipulation and performance routines.
-
Durable Construction: Stable design with optimized weight distribution for dynamic actions.
-
Versatile Applications: Perfect for education, R&D, demonstrations, and robotics competitions.
Mobility & Structure
Attribute
Value
Description
Why It Matters
Locomotion Type
Bipedal, wheeled-hybrid, etc.
Defines interaction envelope
Degrees of Freedom (DOF)
# of controllable joints
Directly tied to dexterity & versatility
Max Walk Speed
m/s
Static, dynamic balancing
Upper Body & Manipulation
Attribute
Value
Description
Why It Matters
Arm DOF
Each arm's axis count
Higher = more natural movement
Hand Dexterity
Pinch / 3-finger / 5-finger
Newtons
Grip Feedback
Force, pressure, tactile sensors
Enables delicate handling and learning
Perception
Attribute
Value
Description
Why It Matters
Visual Sensors (Eyes)
RGB / Depth / IR / LiDAR
Navigation, facial recognition, object tracking
Eye DOF / Movement
Can they move? (Y/N, axis count)
Naturalistic interaction & gaze tracking
Audio Sensors (Ears)
# of mics + array type
Needed for voice commands, sound source localization
Face Display / Actuators
LED screen / moving eyebrows / static
Social communication, emotional response
Face Expressiveness
None / Basic / Realistic
Higher = better interaction in social spaces
Interfaces
Attribute
Value
Description
Why It Matters
Voice Recognition
NLP model + languages supported
Enables natural user interaction
Speech Output
TTS engine used + quality level
Critical for public/commercial use
Touch UI / Screen
Present or not
Optional fallback interaction
Remote Control
N/A
Web / App / Joystick
Needed for manual override or remote training